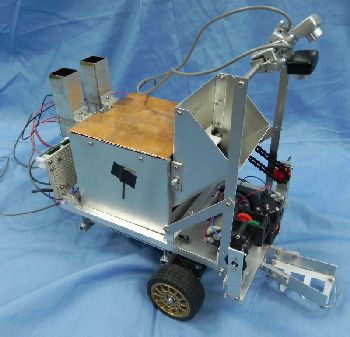
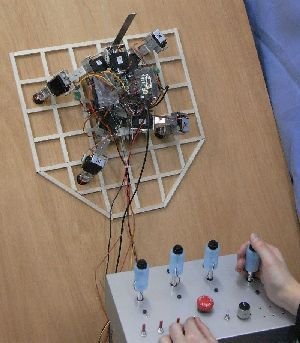
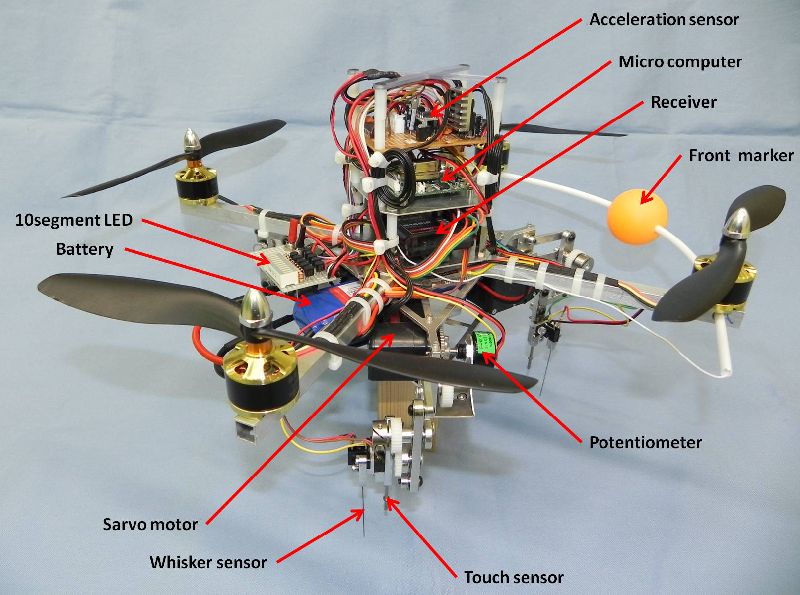
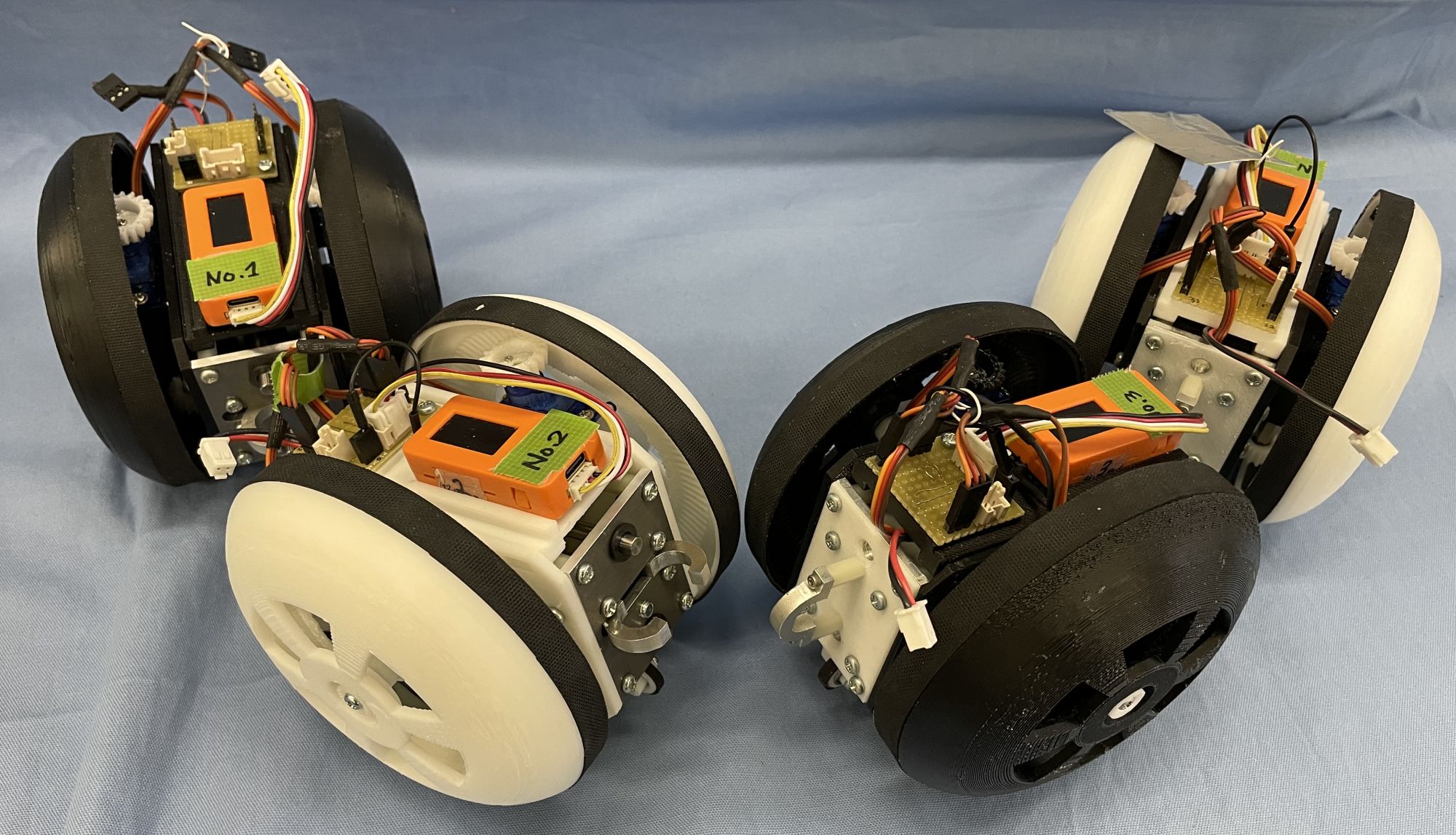
↑枯れ葉を探索・回収・燃焼させてエネルギーを取り出すロボット(2010年度)
これまでに得られたエネルギー収支のデータ
Measured energy income and expenditure
|
収入(Income) Generated energy |
支出(Expenditure) Consumed energy |
|
|---|---|---|
| 2020 |
Complete burning of one dead leaf 1.29[J] 1.48[J](2019 data) |
500mm forward 0.720 [J] 500mm backward 0.692 [J] Open hand 1.57 [J] Close hand 0.464 [J] 1cycle motion Total 3.67 [J] |
| 2016 |
Complete burning of 10[g] paper 1 thermoelectric module 15.8[J] |
1m movement indoor 3.78[J] 1m movement asphalt 5.18[J] Intake motion 0.12 [J] 1cycle motion Indoor Total 4.58[J] On asphalt Total 6.69[J] Ignition by nichrome wire 406[J] |
- Takahiro Doi, Kaede Yamazaki, Leona Mimura, Yuta Uehara, ``Eating Robot: A system that utilizes dead leaf biomass'', Intelligent Autonomous Systems 19 (IAS-19 Genoa), Late Breaking Report, ID 103, 2025.6.30-7.7.
- 大橋琉士, 二上純哉, 山﨑楓, 土居隆宏, ``エネルギー自給型ロボットのエネルギー効率向上のための移動機構と物体検出を用いた経路探索についての研究'', Robomech 2025 山形, 2A2-E08, 2025.
- 佐藤寿起, 大橋琉士, 二上純哉, 山﨑楓, 土居隆宏, ``エネルギー自給型ロボットにおけるバイオマス燃焼炉の開発'', Robomech 2025 山形, 2A2-E11, 2025.
- 山﨑楓, 大竹敦, 吉住啓汰, 土居隆宏, ``エネルギー自給型ロボットのための SSD を用いた枯葉検出器の開発と Dyna-Q による枯葉接近動作の獲得'', ``Development of a Leaf Detector using SSD and Acquisition of Leaf-Approaching Behavior using Dyna-Q for Energy Sustainable Robot'' , 2024 Robomech 宇都宮, 2A1-F06, 2024.
- 山﨑 楓,土居 隆宏, ``エネルギー自給型ロボットにおける強化学習による最適採餌戦略の獲得'', Kaede YAMAZAKI and Takahiro DOI, ``Acquisition of Optimal Foraging Strategies by Reinforcement Learning in Energy Sustainable Robot'', 2024年 第25回システムインテグレーション部門講演会(SI2024)(2024年12月18日~20日・アイーナいわて県民情報交流センター), 1F4-06 , 2024.12.18
- 見邨怜央奈、土居隆宏、岡田和樹、仲秋匠真、廣澤百真, ``エネルギー自給型ロボットの不整地移動および枯葉バイオマス燃焼発電システムの開発'', ロボティクス・メカトロニクス講演会 予稿集, 1A1-L06, Jun 2, 2022. (Development of Mobility on Rough Terrain and Thermoelectric Power Generation by Burning Dead Leaves Biomass System for Energy Sustainable Robots)
- 三巻秀平,土居隆宏, ``エネルギー自給型ロボットのためのGridMapを利用した移動戦略の提案'', 第37回日本ロボット学会学術講演会 予稿集, 3N3-05, Sep, 2019.
-
土居隆宏,
``ものを食べて動くロボット'',
日本ロボット学会誌, Vol.36, No.1, pp.31-36, 2018.
(Eating Robot) -
井上拓真,生藤拓,土居隆宏,
``エネルギー自給型機械システムのためのエネルギー変換機構'',
SI2016予稿集,1G1-2, December, 2016.
(Energy Conversion System for Energy Sustainable Robot) -
井上領,土居隆宏,
``エネルギー自給型機械システムのためのエネルギー効率を考慮した駆動輪制御'',
SI2016予稿集,1G1-1, December, 2016.
(Energy Efficient Control of Driving Wheel for Energy Sustainable Robot ) - 内山雄貴,土居隆宏, ``捕食ロボットの研究'', ロボティクス・メカトロニクス講演会'10予稿集, 1P1-B29, June, 2010.
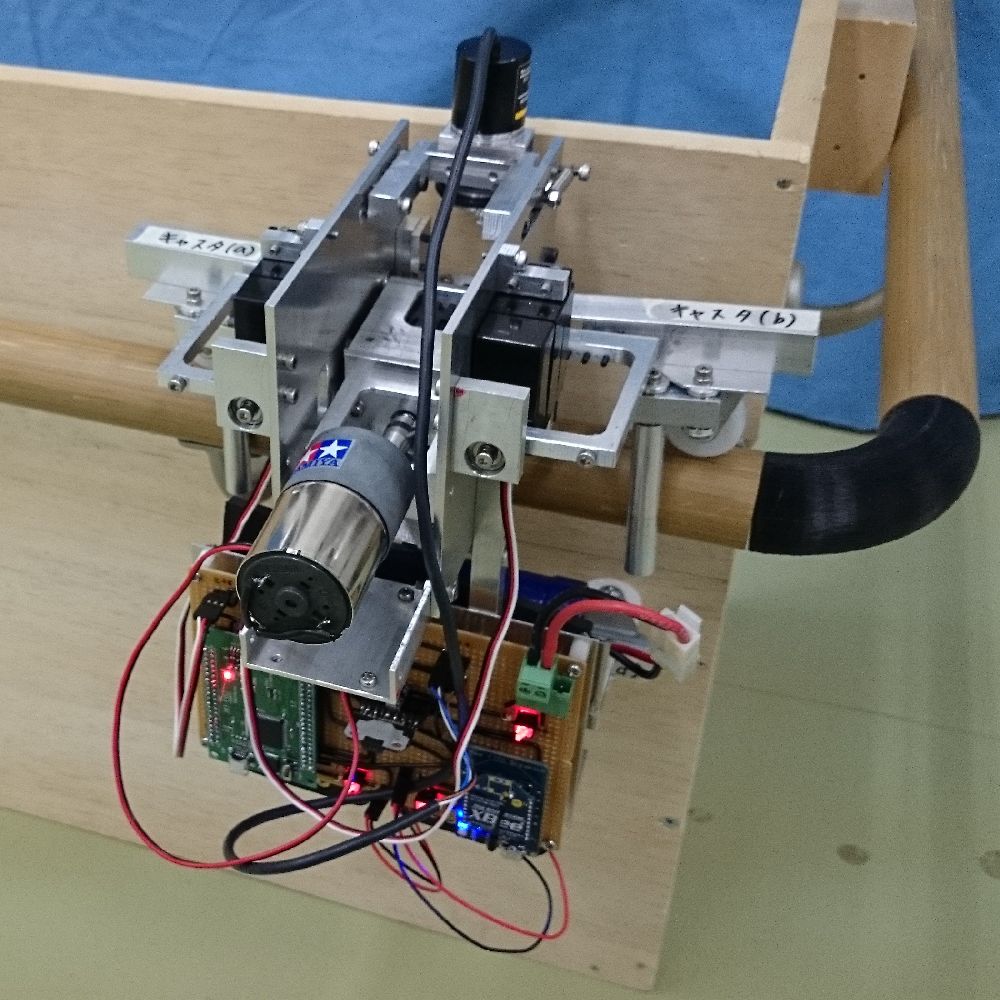
 ↑架線を使った移動ロボットによる害獣対策のコンセプト |
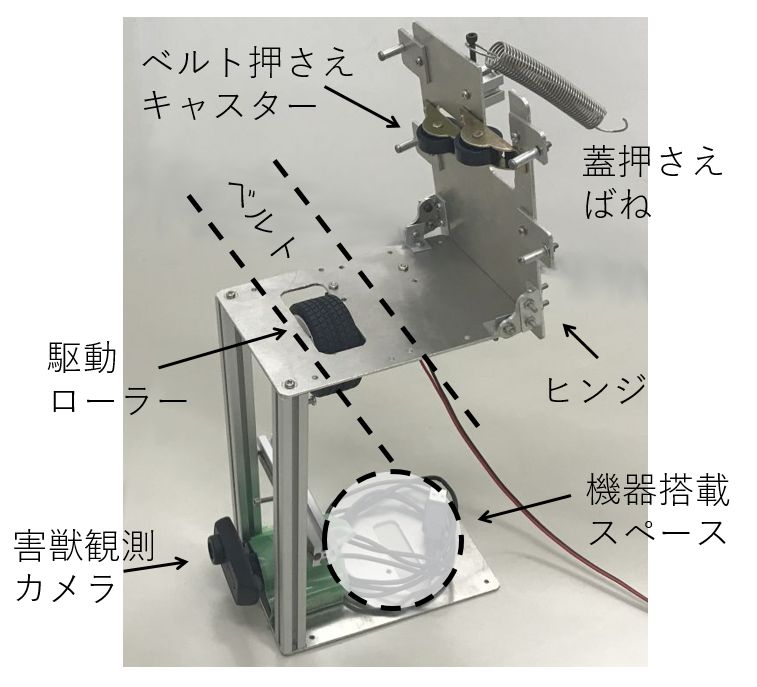 |
↑2025.12.13 カメラを使って害獣を認識し,対策装置が害獣を追跡している様子.
|
2019年度製作機体の諸元,特徴など:
寸法:110x260x150 mm 重量:1.35kgf 製作費:2万円程度 モーター:タミヤ ハイパワーギヤーボックスHE 減速比64.8:1 架線:スラックライン(スポーツ用品)使用 幅50mm程度×最大長15m程度(スラックラインの仕様による) 濡れた場合の摩擦係数14%減 電源:単3電池6本+USBモバイルバッテリー1個 搭載マイコン:Raspberry Pi Model B+ 搭載機器:ブザー,GPS,Raspberry Piカメラ
|
- Takahiro Doi, Atsuki Mizuta, and Kohei Nagumo, "Harmful Animals Detection Using Visual Information for Wire-type Mobile Robots"Journal of Robotics and Mecharonics, Vol.37, No.3, pp.742-751, 2025. DOI https://doi.org/10.20965/jrm.2025.p0742
- 土居隆宏, 水田充毅, 小川健太, 南雲浩平, 永田健太郎, 大井徹, 西田敏明, 北村敏春, ``架線移動型害獣対策ロボット'', 日本ロボット学会誌, 2023 年 41 巻 10 号 p. 846-849, 発行日: 2023年, 公開日: 2023/12/21. DOI https://doi.org/10.7210/jrsj.41.846, (Catenary Mobile Robot System To Prevent Harmful Animal Intrusions)
- 南雲浩平,土居隆宏, ``獣害対策ロボットのための視覚情報を利用した害獣検出システムの開発'', ロボティクス・メカトロニクス講演会2023 予稿集, 2P2-D09, Jun 30, 2023. (Animal detection and tracking control using visual information for robot systems against harmful animals)
- 土居隆宏,永田健太郎,大井徹,西田敏明,北村敏春, ``獣害対策のためのベルト移動型機構'', 第37回日本ロボット学会学術講演会 予稿集, 3I3-04, Sep, 2019.
制作中のブラウザ上で動くインターフェース
↑こちらのQRコードから テストできます. |
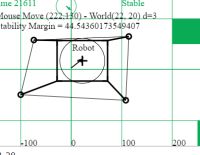
2019年度作成 歩行ロボットシミュレータ |
- 土居隆宏,山岸大典, ``ロボット操縦情報集約のためのwebブラウザを利用した公開インターフェイス'', ロボティクス・メカトロニクス講演会'20, 2020.
 ↑土木作業用4足歩行ロボットTITAN XI (東京工業大学,大昌建設との共同研究) Movie 2016.Feb.23 Walking motion |
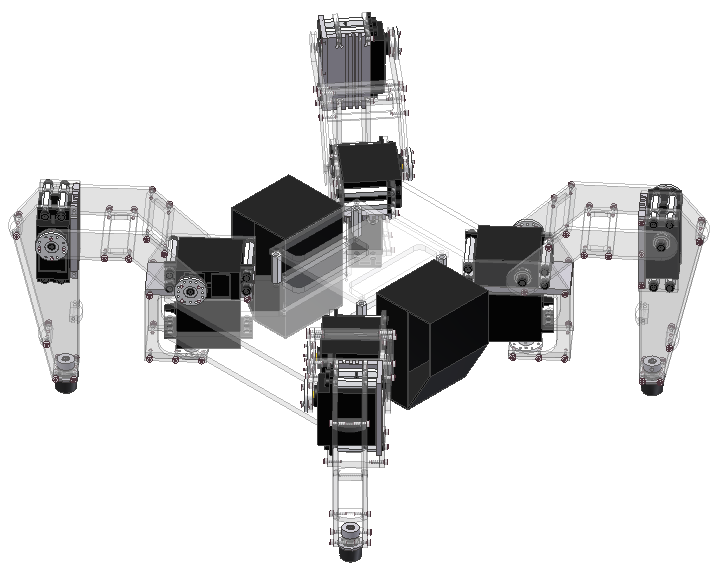
 ↑小型モデルMINITAN (2009年度製作) |
 ↑小型量産型モデルMINITAN Z (2013年度製作) |
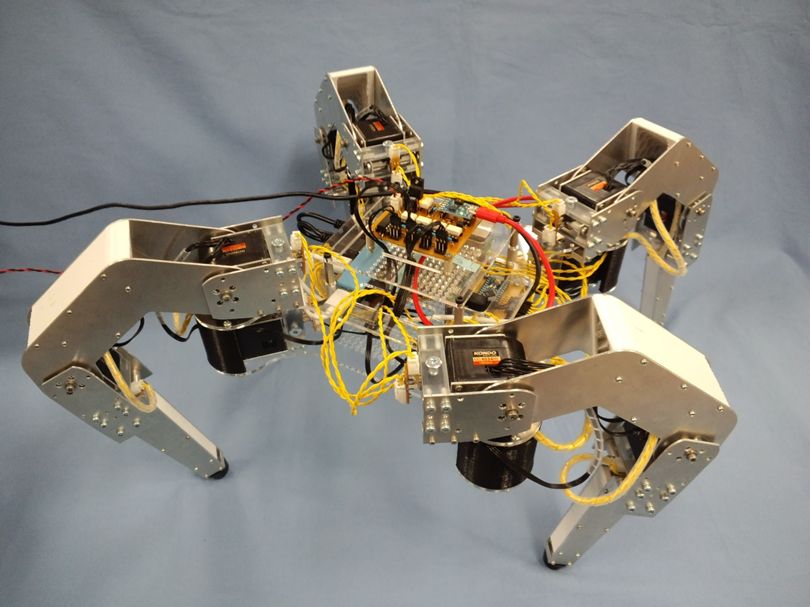 ↑各関節にフロートディファレンシャル機構を利用した トルクセンサを搭載した機体 (2017年度製作) |
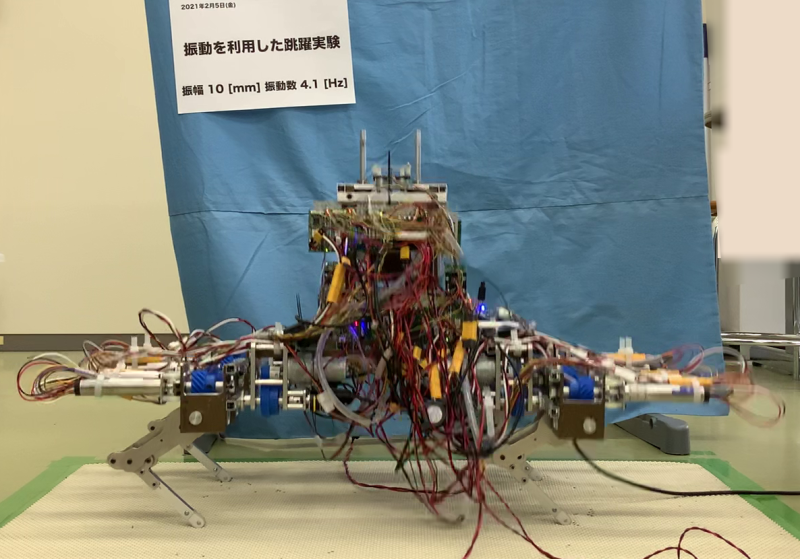
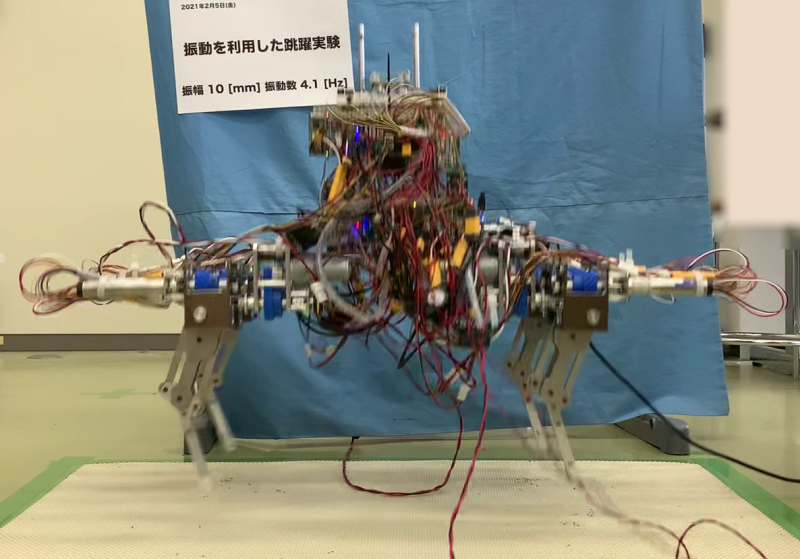
↑振動ユニットを搭載した跳躍4足ロボット(2020年度作成) |
|
教育用歩行ロボットオープンプラットフォーム「cheap4 脚」
- 石川 翔大、土居 隆宏, ``教育用歩行ロボットオープンプラットフォーム「cheap4 脚」の開発'', SI2025 広島, 3B3-03, 2025.12.12
- 菅原 英介, 土居 隆宏, ``重量物を運搬する 6 足歩行ロボットのための胴体一体型把持機構の開発'', SI2025 広島, 1E7-15, 2025.12.10.
- 草川 春樹, 土居 隆宏, ``4 足歩行ロボットのねじりばねを用いた関節トルク補償機構の開発'', Haruki KUSAKAWA, Takahiro Doi, ``Development of Joint on Torque Compensation Mechanism Using Torsion Springs for Quadruped robot'', Robomech 2024, 1A1-H02, 2024.
- 土居隆宏, 橋本和樹, 宮川和也, 小谷和也, 伊藤総介, 井上賢太朗, ``胴体部に振動ユニットを搭載した脚型跳躍ロボット'', 日本ロボット学会誌 Vol.40, No.6, pp.528-537, 2022. (Legged Jumping Robot Equipped with a Vibration Unit on the Body)
- 宮川和也,土居隆宏,伊藤総介, ``多脚ロボットのための振動を利用した脚機構の開発 ―第3報,予備実験および1脚構成での動作試験―'', ロボティクス・メカトロニクス講演会'20,2P1-J03,2020. (Development of Leg Mechanism for Multilegged Robots using Vibration - The Third report, Experiments of Simplified Model and One Leg System -)
- 橋本和樹,土居隆宏,伊藤総介,井上賢太朗, ``多脚ロボットの跳躍動作のための振動を利用した脚機構の開発 ―第 2 報, 振動生成のための制御系とシミュレーション―'', ロボティクス・メカトロニクス講演会'20,2P1-J02,2020. (Development of Leg Mechanism of Multilegged Robots for Jumping using Vibration -Part 2,Control System and Simulation for Vibration Generation-)
- 伊藤総介,土居隆宏, ``多脚ロボットの跳躍のための振動を利用した脚機構の開発 ―一脚試験機と加振装置による特性評価―'', ロボティクス・メカトロニクス講演会'19, 2A1-J02, Jun, 2019. (Development of Leg Mechanism of Multilegged Robots for Jumping using Vibration -Evaluation of Single Leg Model and Vibrator-)
-
水原普賢, 土居隆宏,
``脚型ロボットのためのフロートディファレンシャル機構を利用した安価な関節トルクセンサ構成法'',
ロボティクス・メカトロニクス講演会'17予稿集, 1P1-D11, May, 2017.
(Design of Inexpensive Joint Torque Sensor for Legged Robots using Float Differential Mechanism) - 土居隆宏,日本ロボット学会協力企画 最新ロボット事情 第43回, 「建設用大型4足歩行ロボットの開発」,ロボコンマガジンNo.95 2014.9月号 p.94-97
- 土居隆宏,秋津浩紀 ``教育教材としての4足歩行ロボットモデルの開発'', ロボティクス・メカトロニクス講演会'14予稿集, 1P2-S05, May, 2014
- ロボットのしくみ(新星出版社)ISBN978-4-405-10682-6 C2053
- Hirose, Fukuda, Yoneda, Nagakubo, Tsukagoshi, Arikawa, Endo, Doi, and Hodoshima, ``Quadruped Walking Robots at Tokyo Institute of Technology - Design, Analysis, and Gait Control Method'', IEEE Robotics And Automation Magazine, pp.104-114, June, 2009.
- Doi, Hodoshima, Fukuda, Hirose, Okamoto, and Mori, ``Development of Quadruped Walking Robot TITAN XI for Steep Slopes - Slope Map Generation and Map Information Application -'', Journal of Robotics and Mechatronics, Vol.18 No.3, pp.318-324, 2006
- Doi, Hodoshima, Fukuda, Hirose, Okamoto, Mori, ``Development of a Quadruped Walking Robot to Work on Steep Slopes, TITAN XI (Walking Motion with Compensation for Compliance)'', Proceedings of 2005 International Conference on Intelligent Robots and Systems, no.FPI-2-1, pp.3413-3418, August 2 - 6, 2005, Edmonton, Canada
- 程島竜一, 土居隆宏, 福田靖, 広瀬茂男, 岡本俊仁,森純一,
``4足歩行型法面作業ロボットTITAN XIの開発 - 基本設計と脚機構の動作試験",
日本ロボット学会誌,Vol.23, No.7,pp.847-857 (October 2005)
Hodoshima, Doi, Fukuda, Hirose, Okamoto, Mori, Development of a Quadruped Walking Robot TITAN XI for Steep Slopes Operation - Conceptual Design and Basic Experiment of Leg Driving Mechanism -
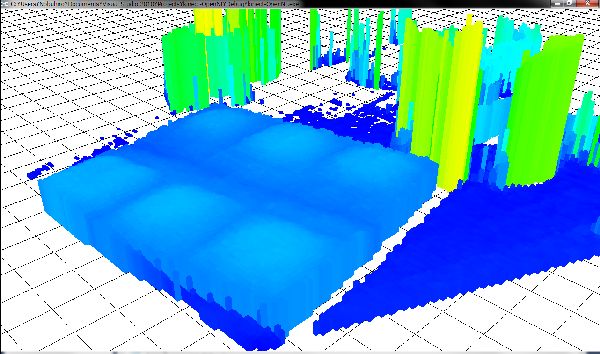
↑三次元センサの情報を使った高さ地図のグラフィック表示
(2011年度)
 ↑デプスセンサ RealSense D435 (2018年度) |
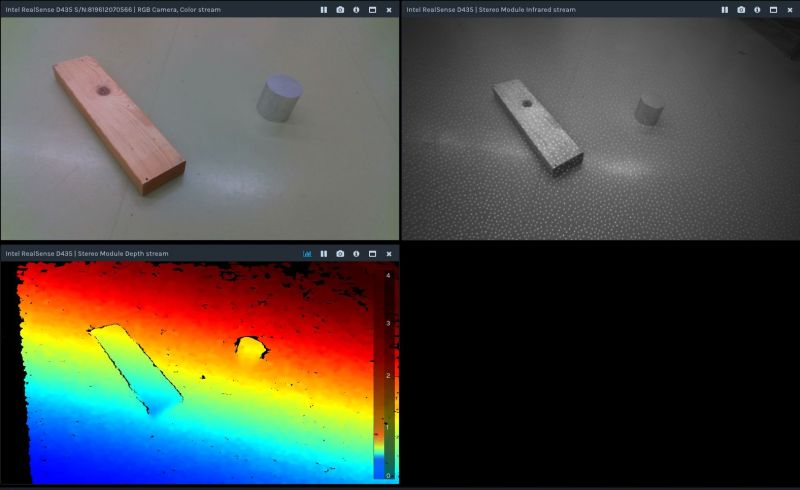 ↑D435による計測例(左上:RGB,右上:赤外,左下:深さ) (2018年度) |
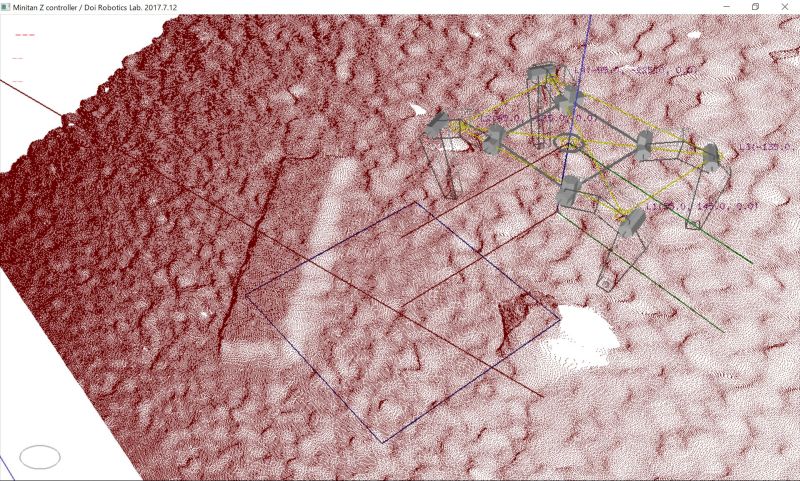 ↑D435による歩行ロボットの移動環境の計測例 (2018年度) |
- 竹田 奏楽、土居 隆宏, ``6足歩行ロボットのデプスセンサを用いた地形適応動作'', SI2025広島, 1B8-11, 2025.12.10.
- 四之宮 啓悟, 土居隆宏, 不整地における爬虫類型 4 足歩行ロボットのための RGB-D カメラを用いた自律歩行制御システムの開発, 日本ロボット学会 学術講演会, 2H3-04, 2024.
- 水田 充毅,土居 隆宏, ``4足歩行ロボットのための深度カメラによる3次元環境認識と自己位置推定'', ロボティクス・メカトロニクス講演会2022,予稿集,2A1-Q06, Jun.3, 2022. (3D Environment Recognition and Self-Position Estimation Using Depth Camera for Quadruped Robot),
- Doi, Hodoshima, Fukuda, Hirose, Okamoto, and Mori, ``Development of Quadruped Walking Robot TITAN XI for Steep Slopes - Slope Map Generation and Map Information Application -'', Journal of Robotics and Mechatronics, Vol.18 No.3, pp.318-324, 2006.
- Doi, Tsukagoshi, Hirose, ``3D Visual Information Processing and Gait Control of a Quadruped Robot'', Journal of Robotics and Mechatronics,Vol.15, No.3, June 2003, pp349-355
- "Study of Shape Representation Using Internal Radiated-light Projection Method," Journal of Robotics Society of Japan, Vol.21, No.4, pp.427-435, 2003.
- 土居, 広瀬, ``レンジ情報を用いた内部放射光投影型形状表現の研究'',日本ロボット学会誌,pp. 427-435, Vol.21, No.4,May, pp.427-435,2003
- 土居,広瀬,``死角域を予測補間する地図生成システムMARSの研究 (独立障害物散在環境での情報処理)'',ロボット学会2003
- Doi, Hirose, ``Study of Shape Representation Using Internal Radiated-light Projection Method'', Journal of Robotics and Mechatronics, Vol.14 No.4, August 2002, pp.357-365.
- 中田隆雅, 青木敦郎, 土居隆宏, ``床下点検のためのヘビ型ロボットの開発'', Robomech2025 山形, 1A1-F01, 2025.6.5.
- 青木敦郎, 土居隆宏, ``蛇型ロボットによる床下点検作業'', Atsurou AOKI, Takahiro DOI, ``Underfloor inspection work by snake robot'', Robomech 2024宇都宮, 2A2-O04, 2024.
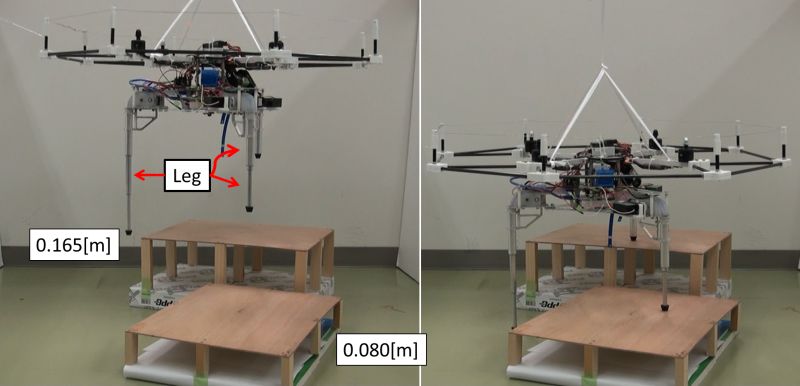
 ↑伸縮型不整地適応脚システムのモデル(2011年度) 飛行,不整地離着陸機能確認済み Movie 2011.12.22 (Flight) Movie 2017.5.30 (Touch/Ultrasonic sensor control) |
 ↑グリッパ型不整地適応脚システムのモデル(2014年度) 飛行,不整地離着陸機能確認済み Movie 2015.1.30 |
 ↑フレキラックを利用した伸縮型脚機構(2016年度) Movie 2017.5.30 |
-
杉岡利樹, 小松﨑友介, 土居隆宏, 多田隈建二郎,
``飛行ビークルのための対地適応システムの開発
―フレキラックを用いた直動型伸縮機構―'',
ロボティクス・メカトロニクス講演会'17予稿集, 1P1-E04, May, 2017.
(Development of Landing Gear for Aerial Vehicles -Linear Drive Landing Gear Using Flexible Rack-) - Yusuke Komatsuzaki, Takahiro Doi and Kenjiro Tadakuma, ``Sensor Based Controlled Leg Type Landing System for Aerial Vehicles'', Proceedings of IEEE SENSORS 2016, Orlando, Florida, USA, pp.56-57, October 30 - November 2, 2016
- 土居隆宏,片山泰伸,黒岩宏行,多田隈建二郎, ``飛行ビークルのための対地適応システムの開発 ―省自由度グリッパを用いた突起部把持動作―'', ロボティクス・メカトロニクス講演会'15予稿集, 2A2-H01, May, 2015.
- 土居 隆宏,石黒司,多田隈 建二郎, ``飛行ビークルのための対地適応システムの開発 ―ジャミング転移現象を利用した機構―'', ロボティクス・メカトロニクス講演会'14予稿集, 2A2-B03, May, 2014.
- 土居 隆宏,多田隈 建二郎, ``飛行ビークルのための多脚型対地適応システムの研究 ―飛行可能な三脚モデルの開発―'', ロボティクス・メカトロニクス講演会'12予稿集, 2A2-I08, May, 2012.
- Takahiro Doi, Kazunori Miyata, Takamasa Sasagawa and Kenjiro Tadakuma, ``Multi-Leg System for Aerial Vehicles'', Journal of Robotics and Mechatronics, Vol.24, No.1,pp.174-179, 2012.
- 桒田知明, 土居隆宏,多田隈 建二郎, ``飛行ビークルのための省自由度対地適応機構の研究'', 第12回計測自動制御学会 システムインテグレーション部門講演会2011予稿集,1M2-1,December, 2011.
- 笹川敬正, 宮田和典,,土居隆宏 ,多田隈建二郎, ``飛行ビークルのための多脚型対地適応システムの研究 - 二脚モデルの動作試験 -'', ,ロボティクス・メカトロニクス講演会'11予稿集, 1A2-O01, May, 2011.
- Kazunori Miyata, Takamasa Sasagawa, Takahiro Doi, and Kenjiro Tadakuma, ''A Study of Leg-Type Landing Gear for Aerial Vehicles - Development of One Leg Model -'',Journal of Robotics and Mechatronics, Vol.23, No.2, pp.266-270, 2011.
- Takahiro Doi, Kazunori Miyata, Takamasa Sasagawa, and Kenjiro Tadakuma, ''Multi-Leg System for Aerial Vehicles'', International Conference on Advanced Mechatronics 2010,2C3-4, October 4-6, 2010.
- 宮田和典,笹川敬正,土居隆宏,多田隈建二郎, "飛行ビークルのための多脚型対地適応システムの研究" - 一脚モデルの動作試験 -, ロボティクス・メカトロニクス講演会'10予稿集, 1A2-C22, June, 2010.
- 土居隆宏, 宮田和典, 笹川敬正, 多田隈建二郎, "飛行ロボットの脚型対地適応システムの研究", 日本ロボット学会学術講演会'09予稿集, 1E1-06, September,2009
 |
 |
 |
- 三島 唯伽, 土居隆宏, ``惑星環境における自律建設ローバシステムの開発'', SI2025 広島, 1C7-05, 2025.12.10.
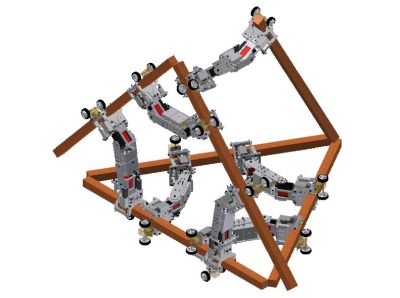
- 土居 隆宏, 小川 謡, 冨所 莉伎, ``球状外殻を有する 小型連結群ロボット'', ロボティクス・メカトロニクス講演会2022 予稿集, 2A1-T02, Jun.3, 2022. (A Swarm System of Small Connecting Robots with Spherical Outer Shells )
- Takahiro Doi, Motohiro Okumura, Tomoki Harada, and Yuto Mitsuma, ``Mechanism and Control of Connecting Robot Moving in Narrow and Irregular Terrain'', Journal of Robotics and Mechatronics, Vol.30, No.5, pp.791-800, 2018.
- 奥村林礼, 土居隆宏, ``狭隘不整地を移動するロボットのための可変屈曲剛性を持つ連結分離機構'' ロボティクス・メカトロニクス講演会'17予稿集, 2A1-D08, May, 2017.
- 土居隆宏,畑中健吾, ``連結型群ロボットによる三次元構造生成'', 第34回日本ロボット学会学術講演会 予稿集 2U1-01, Sep7-9, 2016.
- 樋口朋博, 土居隆宏, ``群ロボットの連結分離機能を利用した環境適応動作'', ロボティクス・メカトロニクス講演会'15予稿集, 2P1-V04, 2015. (Environmental Adaptive Operation of Swarm Robots using Connective Function)
↑曲がった手すりに沿って移動する機構
(2013年度)
Movie 2015.2.12
- 時岡啓,伊藤健,山下哲朗,土居隆宏, ``壁面移動型ロボットアームの研究'', ロボティクス・メカトロニクス講演会'15予稿集, 1P2-S03, May17-19, 2015.
- Takahiro DOI, Kenta SHIROTORI and Ken ITO, ``Development of Wall Mobile Robot for Household Use'', The 3rd International Conference on Design Engineering and Science, ICDES 2014, Vol.2, pp.107-111, Pilsen, Czech Republic, August 31 - September 3, 2014.
- 土居隆宏,白鳥健太,伊藤健, ``補助手すりでの移動を想定した家庭用ロボット'', ロボティクス・メカトロニクス講演会'14予稿集, 1A1-M04, May, 2014.
 |
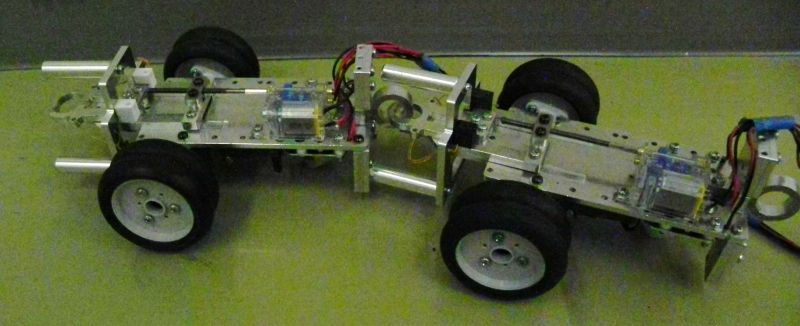
- 土居隆宏, 海道誠門, ``とげの往復運動を利用した不整地移動機構'', ロボティクス・メカトロニクス講演会'17予稿集, 2A1-C08, May, 2017.