佐藤隆一研究室 Sato Ryuichi Laboratory

![]()
視覚情報と化学走性を利用した水上探索ロボットの製作(ポスター)
{kind=link}
研究者:村田和也 (他合同研究2名)
水中航走体の軟着陸システムの開発
研究者:山根雄介
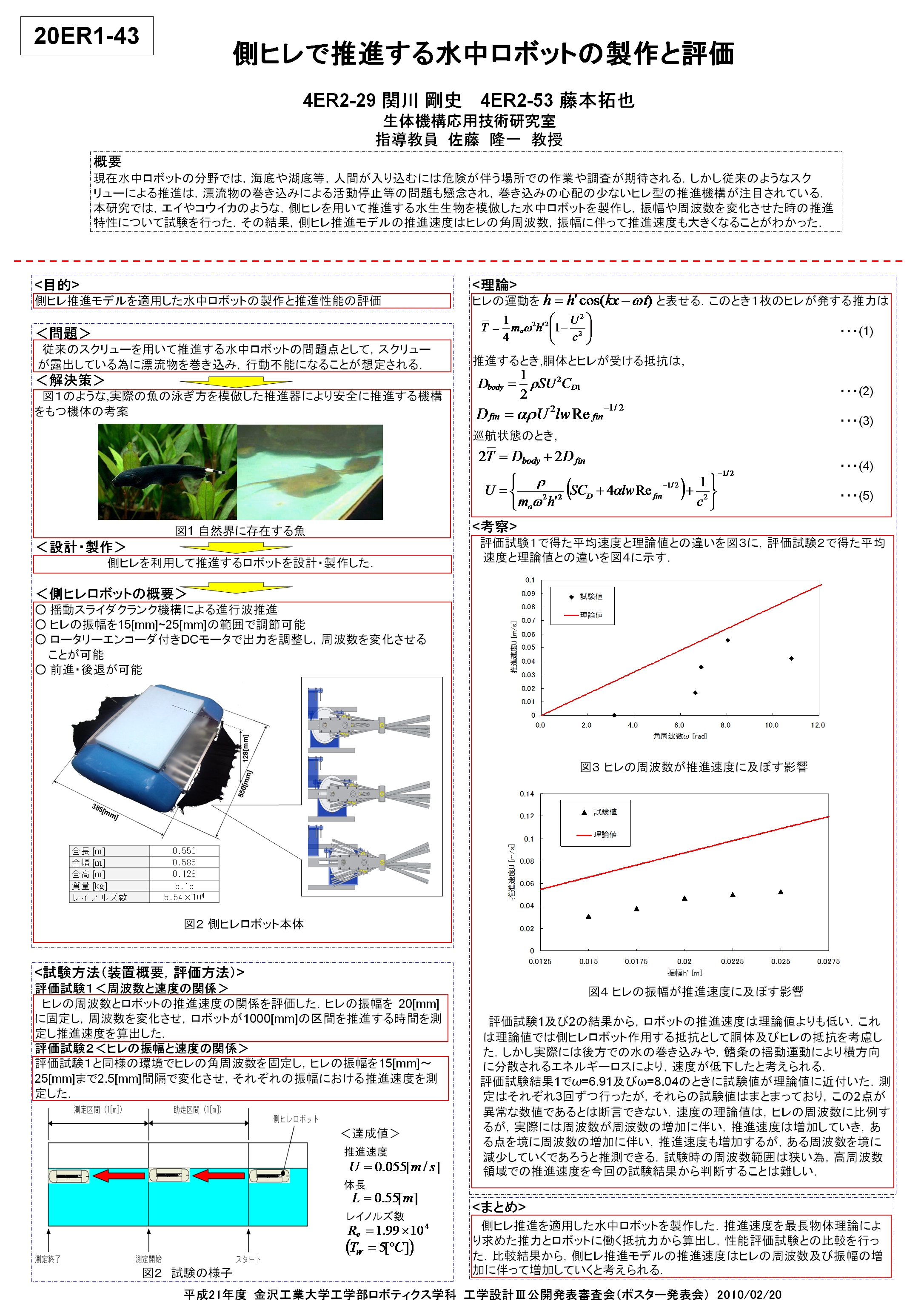
側ヒレで推進する水中ロボットの製作と評価(ポスター)
{kind=link}
研究者:関川剛史,藤本拓也
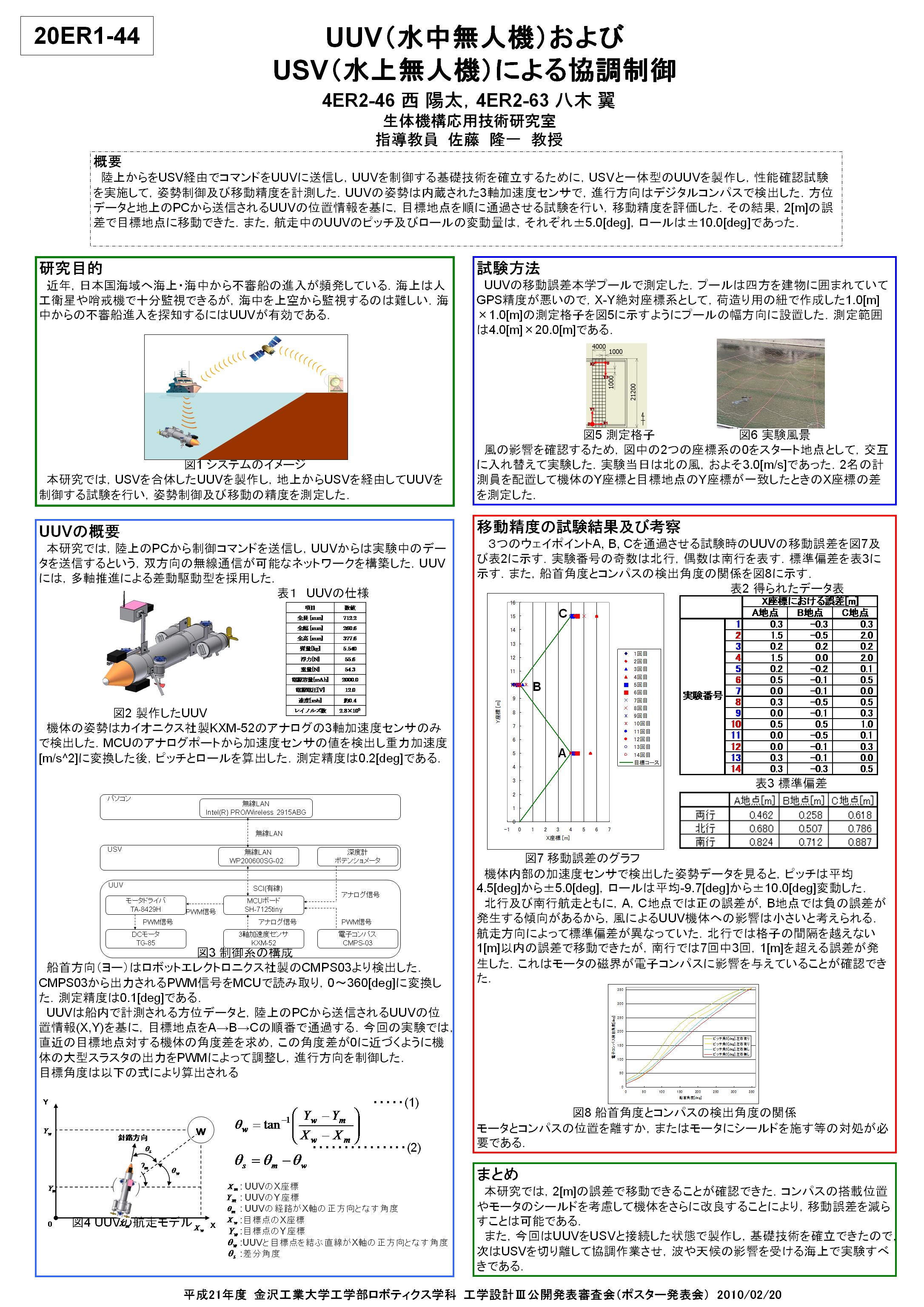
UUV(水中無人機)およびUSV(水上無人機)による協調制御(ポスター)
{kind=link}
研究者:西陽太,八木翼
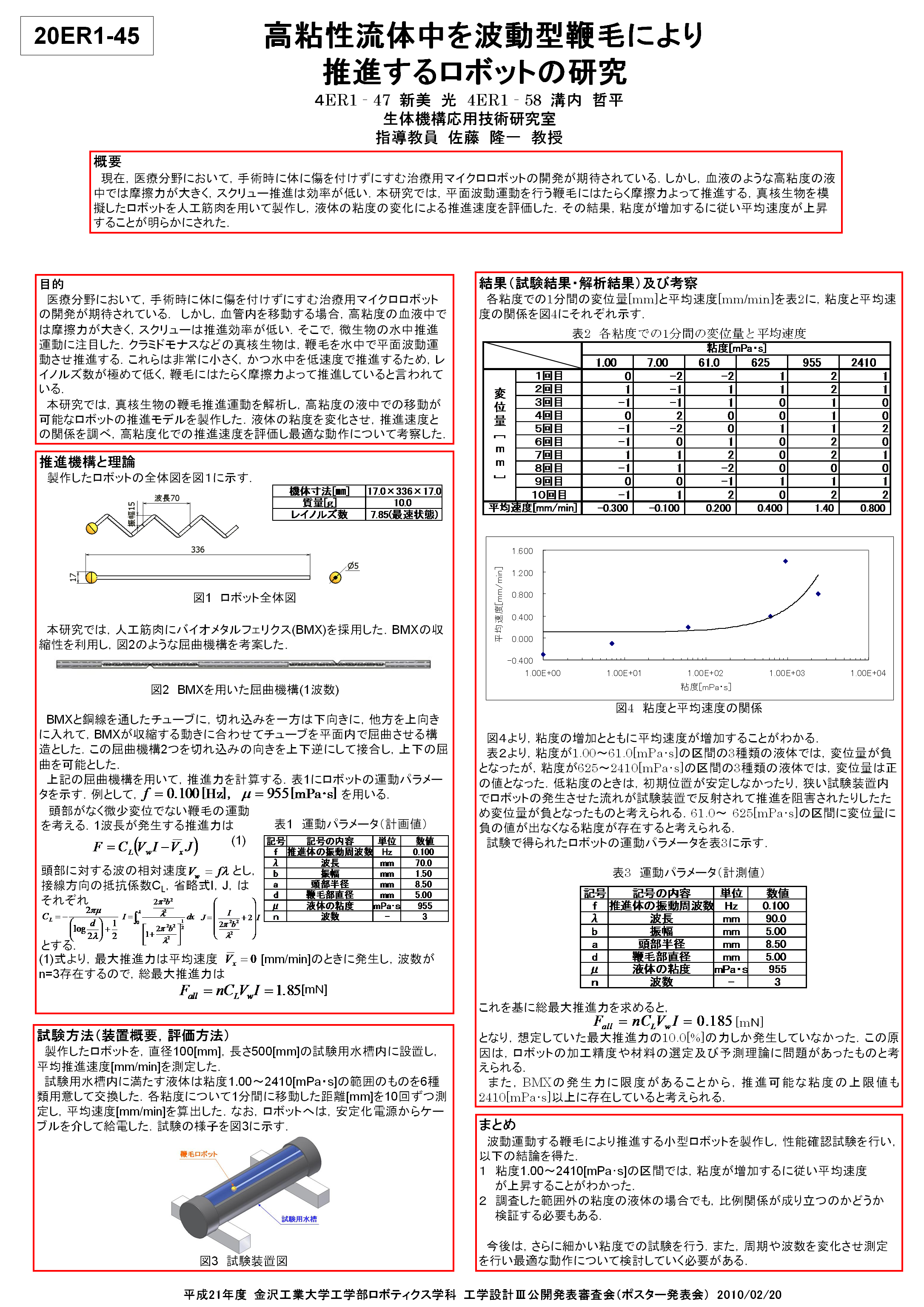
高粘性流体中を波動型鞭毛により推進するロボットの研究(ポスター)
{kind=link}
研究者:新美光,溝内哲平
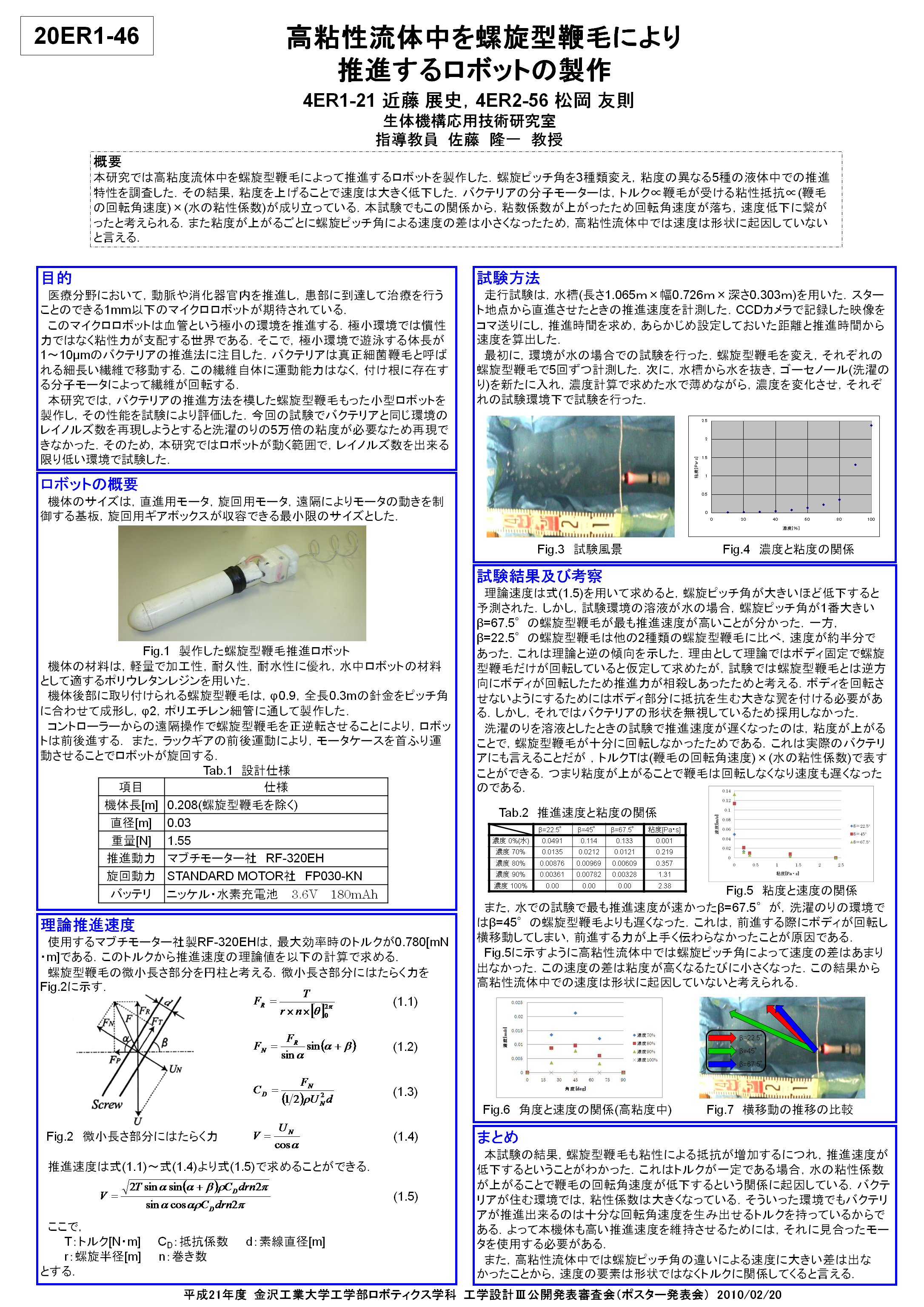
高粘性流体中を螺旋型鞭毛により推進するロボットの製作(ポスター)
{kind=link}
研究者:近藤展史,松岡友則
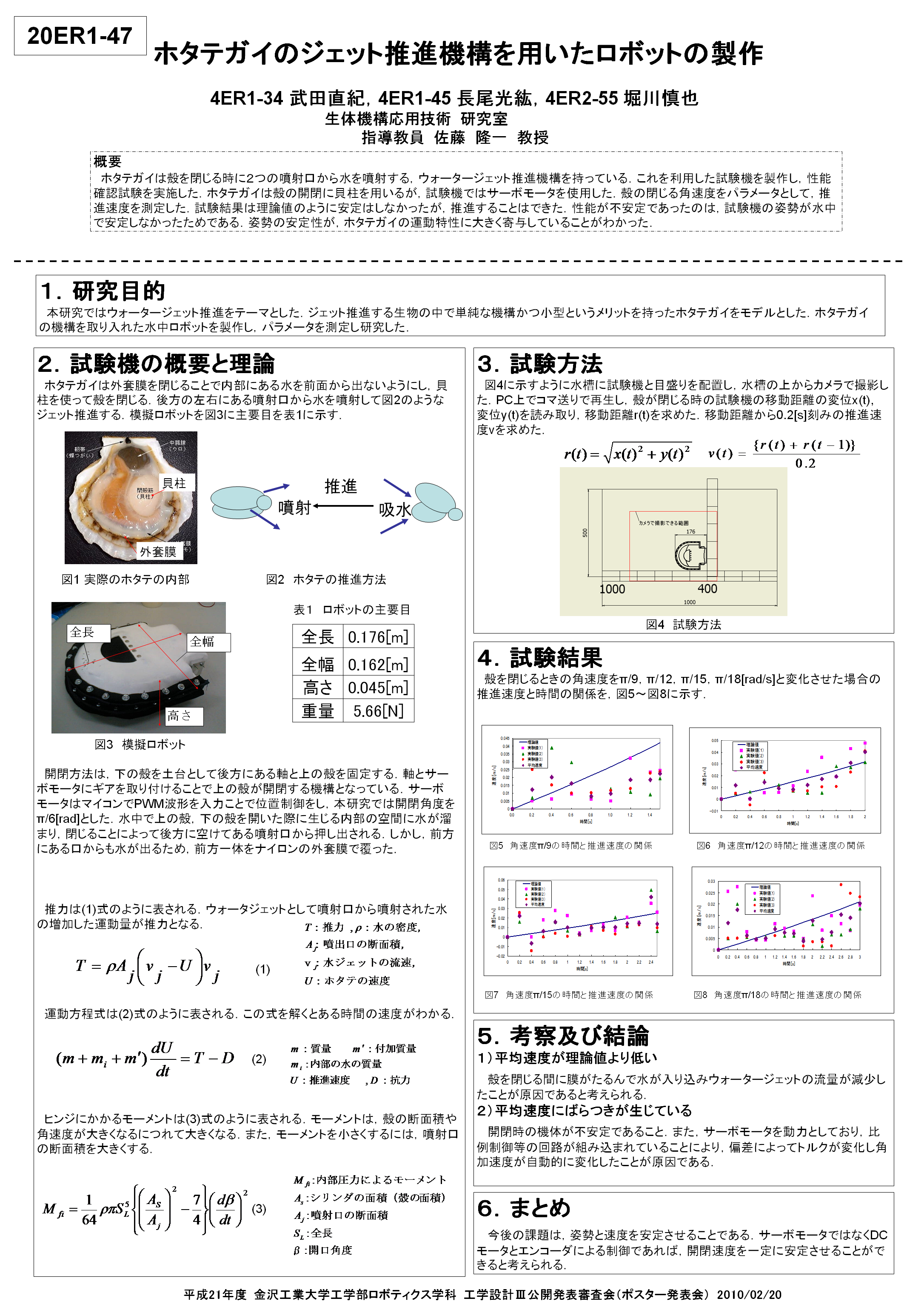
ホタテガイのジェット推進機構を用いたロボットの製作(ポスター)
{kind=link}
研究者:武田直紀,長尾光紘,堀川慎也
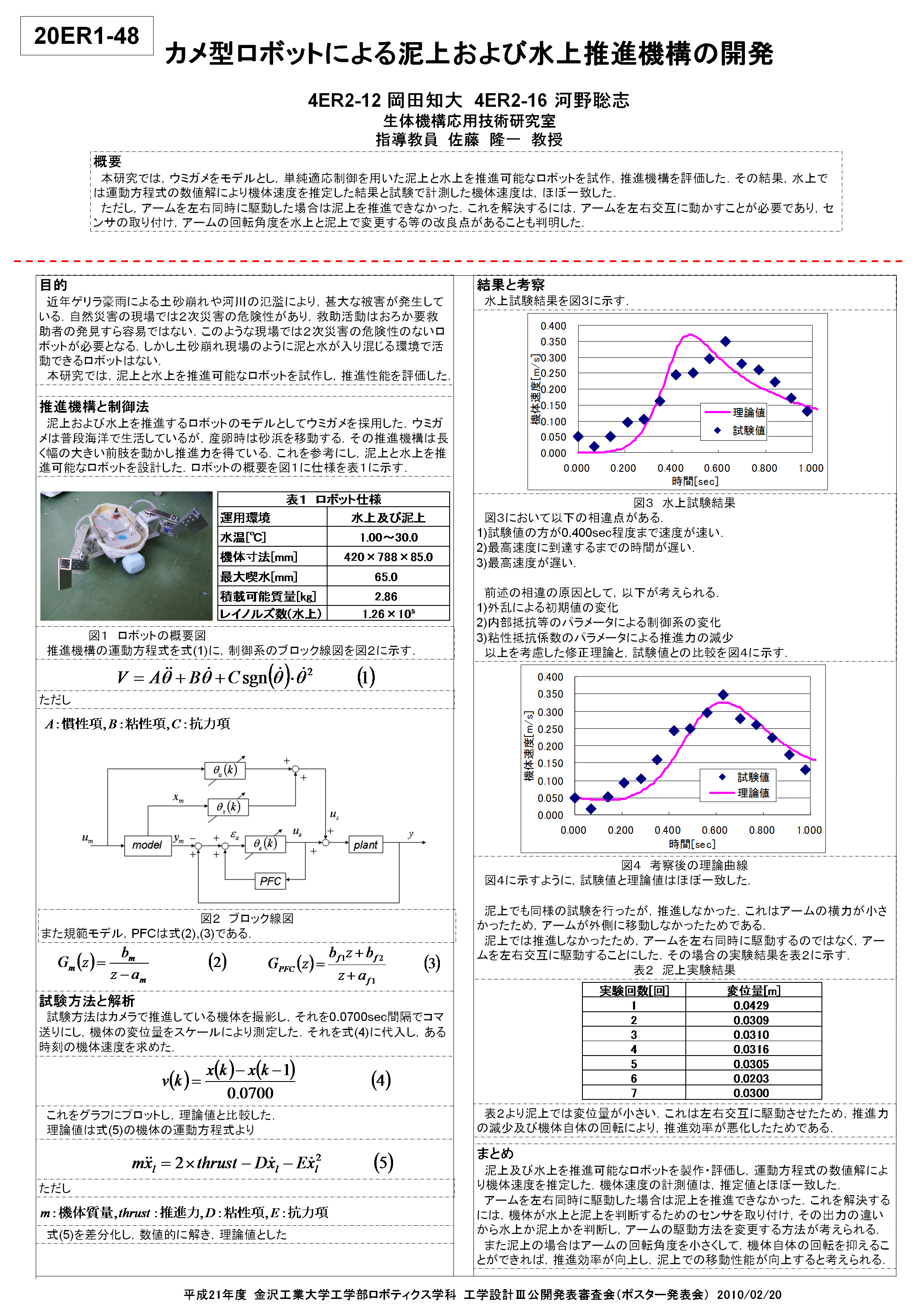
カメ型ロボットによる泥上および水上推進機構の開発(ポスター)
{kind=link}
研究者:岡田知大,河野聡志
Copyright (C) Sato Ryuichi Laboratory. All Rights Reserved.