
近年, UAVによる宅配などが行われている. 今後もUAVの社会進出による需要の増加が予想される. UAVの様々な利用法が確立されていく中で, 私たちは工場など屋内での利用法について注目した. 工場は天井に空間がある所が多い. その空間にUAVを導入することで有効に利用できると考えた. しかし, 現在の制御ではカメラやGPSを用いて制御をしているため屋内での正確な制御を行うことが難しい. そこで私たちは屋内で使用することが難しいGPSの代わりにIndoor Positioning System(IPS)を使用した 屋内でのUAV制御システムを構築する. 本研究では, IPSによって屋内に座標を設定することで UAVを初期値から目的地へいくことを可能にする.
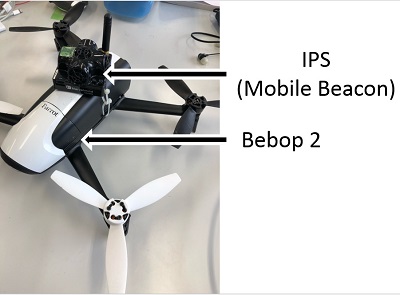
本研究ではbebop2を利用する. カメラの角度を変えられることや, SDKをまとめたパッケージがあるため選択した. また, IPSに使用するsensorがdroneの上に固定されている.その他に壁の四方に設置し, 超音波により位置を計測する.
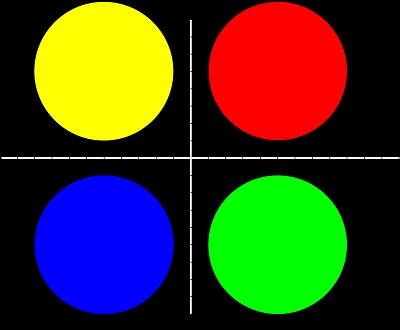
本研究で使うシステムでは正確に着陸地点に着陸することが難しい. そこで4色のマーカを着陸地点に置き, 画像認識することで正確に着陸を行うことを考えた.
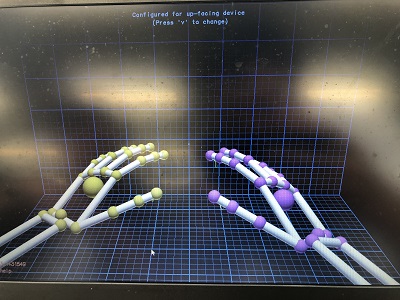
本研究では, 緊急時に着陸できるようインターフェースとしてLEAP Motionを採用している. これにより直感的に緊急動作を行うことができる.
工場の自動化を行う際に天井をのスペースを複数台のドローンが互いを認識しながら荷物や情報を運ぶ. その他に, 倉庫の点検や上下に移動が必要な場所で利用することで効率化を測る.