VR空間とモータアシストを用いたFES上肢屈伸システムの構築
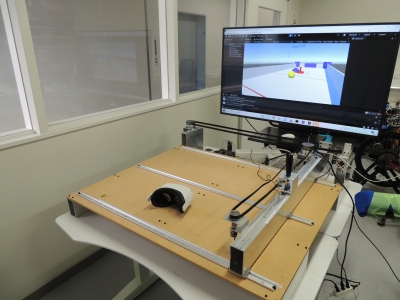
In this paper, we develop FES upper limb bending and stretching system using VR space and motor assist for integration into the FES system used in rehabilitation of patients with stroke or spinal cord injury. The developed system equipment is equipped with a 3-axis force sensor, two motors, and two encoders. Since it is difficult for paralyzed patients to move their arms, the motor is controlled to assist the patient according to the value of the 3 axis force sensor attached to the handle. In order to make rehabilitation more motivating, we used VR for more reality than conventional serious games.
モータアシストと重力補償機構を有するFES下肢交互屈伸トライクの構築

In this paper, we propose a rehabilitation system using FES alternate knee bending and stretching trike and motor assist. A strategy is to construct a motor drive mechanism for the rear wheels of the FES alternate knee bending and stretching trike. In addition, a gravity compensation mechanism is built for pedal friction caused by gravity during alternating knee bending and stretching movements. By combining these, smooth FES alternating bending and stretching motion and stable running in FES alternating bending and stretching trike are realized. Experiments are conducted in three healthy individuals. Finally, we evaluate the usefulness of the system by comparing it to conventional systems.
イチゴ摘果用エンドエフェクタ及びロボットアームの提案と試作

In this paper, we have developed a robot that can remotely thin out strawberries in order to reduce farmers burden caused by the declining birthrate, aging population, and labor shortage in agriculture. The robot is equipped with a horizontal articulated arm, and the robot can be remotely controlled by creating an application software. The operator controls the robot by keyboard operation based on images from two cameras. The end-effector has a pair of scissors for laparoscopic surgery, which allows for quick thinning without interference from strawberry leaves and stems. We evaluated the developed robot by remotely conducting thinning out strawberries in an actual strawberry farm.
沐浴可能なモロ反射を再現した新生児ロボットの製作

In this paper, we develop a Moro reflex newborn robot with waterproof function. Since newborns are not immersed in water from the neck up during bath training, we attempt to prevent water intrusion by separating from the neck and the circuitry from the body and completely sealing the lower part of the body. We evaluate the developed robot by analyzing arm motion using OpenCV and MATLAB.
上体の姿勢を考慮したFES立ち上がり補助システムの構築
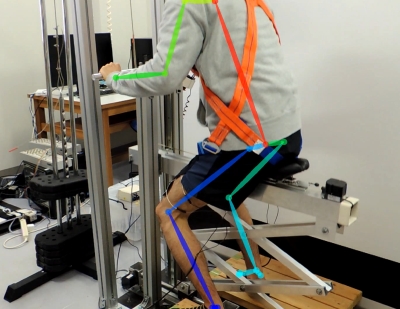
In this paper, we propose a functional electrical stimulation (FES) standing up support system which considers upper body posture. OpenPose is used in this system to get upper body posture's data and measure center of gravity. By using a shift table for the sliding part, the seat can be moved up and down more smoothly. The use of a wire harness at the top of the device improved user safety.