モータアシストを有するFESトライクシステムの構築

In this paper, we propose a functional electrical stimulation (FES) rehabilitation system having a motor for people suffering from disorders affecting the muscles of the lower limbs using recumbent tricycles as platform. The FES rehabilitation system makes it possible for the user to start muscle stimulation of lower limbs by themselves. To evaluate the usefulness of the developed FES rehabilitation system, we conduct experiments to compare the tracking performance of pedaling with a motor assisted start versus a manual push start. From the experimental results, we confirm that the system allows the user to start pedaling by themselves.
自動ギアチェンジ機構を有するFES下肢交互屈伸トライクの構築
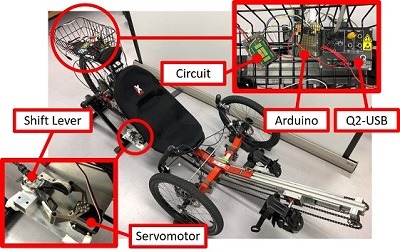
This paper proposes a functional electrical stimulation (FES) rehabilitation system for people with paralysis in the lower body and upper limbs. An automatic gear change mechanism is developed for the alternate knee bending and stretching trike. In the proposed system a hall sensor measures the speed of the recumbenttrike. And when the speed of the recumbent trike changes, a motor rotates, which causes the gear to change. Experiments were conducted on a healthy male in his twenties, who rode the recumbent trike with the automatic gear change mechanism outdoors. As a result, as the recumbent trike's speed changed, the gear also changed automatically. Therefore, people with paralysis in the upper limbs could also change gears using the proposed system.
Leap Motionを用いたFES手指リハビリシステムの構築

The purpose of this study is to restore motor function, using functional electrical stimulation (FES), to people with disorders in upper limb muscles. In this research we develop a hand rehabilitation system using FES while focusing on the muscles of the fingers. Using RehaStimwhich is a muscle stimulator, electricity is applied to the electrode pads attached to the hands in order to move the fingers as desired. Verification of the system is done using Leap Motion to detect movement the hand and read positional information as data. We verified the usefulness of the system through experiments.
脳波計によるユーザーインターフェース構築のためのリアルタイム脳波分類

This paper presents the application of real-time electroencephalogram analysis to develop a user interfacewith an electroencephalograph. The aim of this study is to remove noise composed of the induced potential of the power supply and artifacts from eye movements and blinks. To this end, we use a matlabapplication which uses a digital filter and a combination of Independent Component Analysis (ICA) with Empirical Mode Decomposition (EMD) to remove noise. The digital filter is used to remove noise caused by the induced potential of the power supply, and the combination of ICA with EMD is used to remove artifacts. Developed system was able to remove noise, and measure the Event Related Potential (ERP) brain waves called P300.
LRFを用いた人物追従可能な医療用搬送カートの製作

In this research, we propose a medical transport cart that is able to follow a target person using sensor data from a laser range finder. An electromagnetic clutch was attached between the motor and the front wheels so that it is also possible to push it like a conventional cart. We created a pure pursuit algorithm and a tracking algorithm using PID control. In order to evaluate the detection rate of people and the route taken by the cartwhile following the target person, we carried out experiments by running the cart following a fixed route.
IPSとカメラを用いた屋内環境でのUAV制御システムの構築

In this paper, we propose an indoor autonomous flight control system for a UAV (Unmanned Aerial Vehicle) using IPS (Indoor Positioning System) and on-board camera. Firstly, the IPS obtains positional information of the UAV, which the UAV uses to move from the starting point to the target point automatically. Due to the error in the positional information obtained from the IPS, it is difficult for the UAV to land at the target point accurately. Therefore, by switching operation method to using the on-board camera when the on-board camera detects the AR marker that is set at the target point, the UAV is able to move to the target point accurately. Furthermore, manual operation method using LEAP Motion can help prevent dangerous situations of the UAV by holding your hand over the sensor and controlling the UAV using hand gestures.
懸垂型可動軸を有する並進翼風車の開発

In this research, we aim to improve the generation efficiency of the traversing wind turbine by developing the suspended-type mechanism. Currently, it is a problem that this wind turbine has a low power generation efficiency due to friction during rotation. In order to solve this problem, we proposed a suspendedtype mechanism using a V-shaped roller as a tire which enables running on a V-shaped rail. In the traversing wind turbine which uses a new mechanism, evaluation experiments of the suspended-type mechanism and experiments to evaluated power generation were performed. Finally, improvement of power generation efficiency was evaluated from the experimental results.