リカンベントトライクの車速を考慮したFESによるペダリング運動の研究
In this paper, we present a functional electrical stimulation (FES) pedaling system taking into account the cycling velocity of recumbent tricycles for people suffering from disorders affecting the muscles of the lower limbs. The developed FES pedaling system makes it possible to perform pedaling considering environmental factors such as undulation of the road surface and wind. Therefore, it will be possible to use the rehabilitation system outdoors. To evaluate the usefulness of the developed FES pedaling system outdoors, we conduct experiments to compare the tracking performance of pedaling using the conventional system and pedaling using the developed system. From the experimental results, we confirm that the developed system can be used for outdoor rehabilitations.
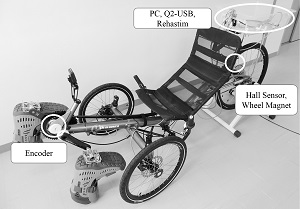
下肢交互屈伸機構によるFESリカンベントトライクの構築

In this paper, we propose a rehabilitation system for people with disability in the lower body. The developed recumbent trike has a belt and idler pulley mechanism and a linear motion conversion mechanism. The proposed system works alternate knee bending and stretching motion by using functional electrical stimulation (FES). A RehaStimTM current-controlled dtimulator is used to send appropriate currents to the musels based on the control programs. Two pairs of 3" by 4" rectangle PALS R ? electrodes are attached on the quadriceps and the hamstrings. We veri ed the usefulness of developed system by compare voluntary alternate knee bending and stretching and the same motion using FES. The experimental results showed that the control tracking using FES can realize similar to volitional motion.
パンタグラフ機構と機能的電気刺激による立ち上がりリハビリシステムの構築
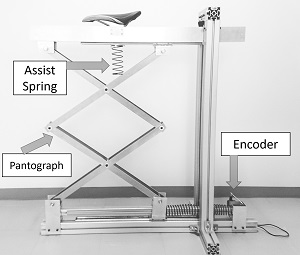
This paper presents the development of rehabilitation system with pantograph mechanism for people with disabilities in the lower half of the body. This pantograph mechanism is able to suppress the deviation of the front and rear height caused by the movement of the center of gravity at the time of vertical movement and the individual difference of the sitting position. The aim of this study is to close the desire position of following-up more stable of the seat part. We do a comparative experiment with voluntary tracking and controlled tracking using the functional electrical stimulation system. From experimental results, we can confirm the usefulness of proposed system with the pantograph mechanism.
受動的な翼角度調整機構を有する並進翼風車に関する研究

In this project, we develop a passive blade angle adjustment mechanism for traversing wind turbines. The passive blade angle adjustment mechanism is a mechanism that passively adjusts the blade angle by using the force of wind. This mechanism makes it possible to reduce damage due to strong wind or high speed rotation. Moreover, by using a toothed pulley, vertical misalignment which occurs when moving the blades can be eliminated, and unlike designs for traversing wind turbines used in a prior research, the need for paired blades is removed. Furthermore, we perform experiment to measure blade speed using the developed system.
並進翼風車における発電量計測システム
In this paper, we present a power generation measurement system for a Traversing Wind Turbine. In order to evaluate the Traversing Wind Turbine under conditions close to actual use, we aim to measure it under load. Therefore, we attach a generator and a rotary encoder to the wind turbine as well as design a circuit that consumes the power of the generator by a speci ed amount. Using the results obtained from the experiments we compare the load and the generated current, and evaluate the measurement system. The results given in this paper con rm that the power generation quantity measurement system worked properly.