AKAZE を用いたUAV の複数台追従システムの構築

近年では,災害対策を目的とした次世代ロボットが研究開発されており,人間の能力を超えた作業遂行が望まれている. そこで本研究では,救助が必要な人などを上空から発見し,その位置情報を送受信する手法として, ドローンから送られてくる画像を取得し,AKAZEアルゴリズムを用いて地上移動体を発見次第追従する制御システムと, 視野を広げる利点から複数台のUAV(Unmanned aerial vehicle)を加速度センサを用いたフォーメーションを組み飛行するシステムを構築し, そのシステムの各要素についての評価をおこなう.
フリーホイールを用いた下肢交互屈伸システムの構築

本研究の目的は,下肢の筋肉に障害を抱える人への機能的電気刺激を用いた運動機能の維持・回復である. そこで,太ももの筋肉に焦点を置き,機能的電気刺激を用いた下肢交互屈伸システムを構築する. 筋肉刺激装置であるRehaStimを用いて,脚に貼った電極パッドに電気を流し下肢交互屈伸運動をおこなう. 制御によって目標値追従をおこなう運動と,被験者自身が自発的に目標値追従をおこなう運動について比較し, システムの有用性を検証した.
ペダリング運動における漕力測定システムの構築

本研究の目的は, FESを用いたペダリング運動の力の出力, 方向の測定である. そこでFESを用いた自転車のペダリング運動に対して, クランクの角度による脚の力, 方向を検出する装置, システムを構築した. クランクを固定した角度に対する接線方向を理想とし, FESを用いたペダリング運動でのペダルから出力される力の角度と比較する. 理想値と測定値の角度の差, 検出された筋機能効果からFESを用いたぺダリング運動の有用性,筋機能効果の個人差を確認した.
医療用搬送カートのユーザーインターフェースの構築
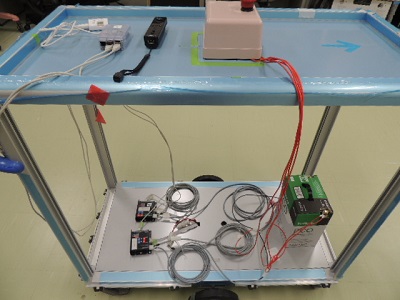
本研究では,看護師不足による,看護師一人の労働負担の増加を減少させるため, 医療用搬送カートを操縦走行させるためのユーザーインターフェースの研究・開発を行う. そこで,ユーザーインターフェースとして,Wiiリモコンを用いる. またシステムの処理やモータの制御等にRaspberrypi2 ModelBを用いる.Wiiリモコンの操作により, 医療用搬送カートが移動するシステムを構築し,実験により動作の確認を行う.