腹腔鏡把持ロボットの製作と操作用インターフェースの開発

本研究では,腹腔鏡手術の手術支援と手術環境の改善を目的に腹腔鏡把持ロボットの製作と操作用インターフェースの開発をおこなった.機構には,パラレルメカニズムを利用し自由度を6自由度の多くの自由度を活用できるようにした.インターフェースには眼電位センサを使用し,左右の眼の筋電を用い視線制御をおこなった.また,研究に使用する眼電位センサはスイッチの役割を施している.そこで,これらの評価実験としてマーカーの追従制御と視線移動による視線制御の評価をおこない,よりよい手術環境の実現を目指した.
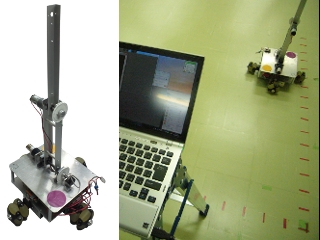
医療用カートの人物追従機能付加に関する研究

本研究の目的は看護師の労働者個人の負担を直接減らすことである.そこで医療用カートに駆動ユニットを付加し,自律起動できるロボットを製作する.そこにカメラで目標の視覚情報を取得し,SURFを用いたオブザーバによる位置姿勢推定によって人物追従おこなう.また,測距センサを搭載することで非常時に緊急停止させることで安全性を向上させる.追従性は定置実験,追従実験をおこなうことで評価し,結果より人物追従機能の有効性を示した.
二関節筋を用いたロボットアームの製作と制御
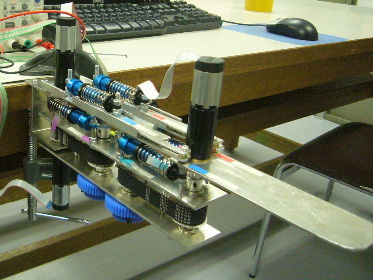
隣接した2つの関節にまたがっており,2つの関節を同時に動かすことができる拮抗二関節筋は人体の動きに関係する重要なメカニズムの1つであると知られている.そこで二関節筋を用いたロボットアームを製作し,受動性に基づく制御則での安定性を解析する.またPD制御での定置実験をおこない,ロボットアームにおけるダンパの有効性を検証する.実験の結果,ダンパによってオーバーシュートを抑制することができた.
モバイルマニピュレータの製作と制御
本研究では,モバイルマニピュレータの機体製作と制御をおこなう.製作したモバイルマニピュレータは,全方位型移動ロボットと2自由度マニピュレータで構成される.全方向移動機構により回避運動,小回りが利き複雑な動作をおこなえる.制御は運動モデルを制作し,移動ロボットはPID制御,マニピュレータはダイナミクス補償を加えたPD制御をおこなった.10秒間指定の速度を与え,理想軌跡と実測値を比較し動作を確認した.
脚車輪型四足歩行ロボットの製作と制御 〜視覚情報を用いた回避と踏破〜

本研究では画像処理による障害物の認識によって移動方法を変化させる脚車輪型四足歩行ロボットを製作する.ロボットには視覚情報を取得するためのカメラを搭載し,取得した情報から障害物の有無や目標物の位置を認識する.この情報からロボットの操舵角を決定することで障害物の回避と目標物の追従を可能とする.また,障害物を回避不可能であると判断した場合は歩行状態による移動をおこなうことで障害物の踏破を可能とする.そこで本研究では,障害物の回避・踏破と目標物追従の3種類の実験をおこない評価する.