複数カメラを用いた広視野案内ロボットの製作
複数のカメラを互いの死角を補うように配置することで, 広範囲の視野をもつ案内ロボットを製作する. 複数のカメラを用いることで, 球型鏡を用いた全方位カメラとは異なり, 広範囲でかつ精細な画像を得ることができる. また, 主要なセンサをカメラに絞ることで, コストの削減とシステムの簡略化を図る. 複数のカメラから得られた画像情報を用いて, 通路の認識, 自己位置同定,案内を必要としている人物の認識をおこない, あらかじめ決められた経路を人に先行して走行し案内をする.
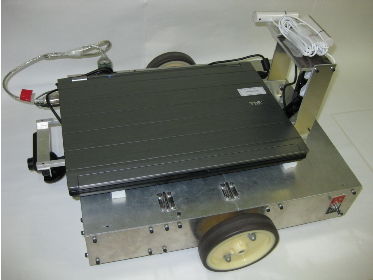
視覚情報を用いて不整地を走行する自律型ロボットの製作

本研究では, 視覚情報を用いて不整地を走行する自律型ロボットを製作した. 製作したロボットはブレーキ機構とディファレンシャルギアを用いて左右旋回をしている. また, ロボットに取り付けているカメラユニットは障害物を踏破しているときに上下に動かすことで目標物を見失わないようにしている. カメラから得られた画像情報をフィードバックすることで追従走行を可能にした. 本稿では, 製作したロボットの整地と不整地での目標物追従実験をおこない, 追従性能を評価した.
視線入力による追尾システムの製作
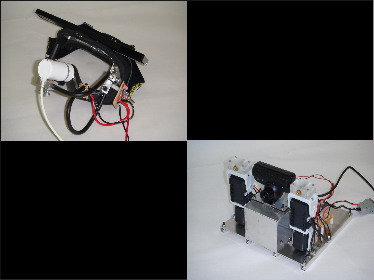
本研究では視線入力による追従システムの構築をおこなう. 視線の動きを読み取る装置と注視している場所を指し示すようにする装置の2 種類を製作した. 視線の動きを赤外線カメラによって読み取り, 拡大, 2 値化などの画像処理をおこなったあとに瞳孔の重心の位置座標を算出する. 算出した座標より, どの場所を注視しているかを読み取り, 注視している位置に対してモータを制御してレーザーポインタを指し示すことでシステムの実現性と有効性を検証する.
視覚情報を用いた指のテレオペレーション

本研究では視覚情報を用いた指のテレオペレーションの実現を目的とする. そのため, 人間の人差指を模した平面3自由度マニピュレータを製作する. また, 視覚情報として人間の指を閉じる, 開く動作を与え, 画像処理を用いて視覚情報から目標角度を生成する. 画像処理では, 指に付けた1色のマーカーから3つの関節角度を生成する. 生成した目標角度に対して, マニピュレータの各関節角度を追従させる. 定置実験, 任意波形における追従実験, 視覚情報を用いた追従実験をおこない, 位相遅れや偏差を確かめる.
カメラを用いた死角に存在する観測対象物の検出と視覚支援
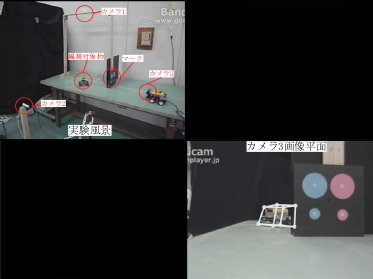
本研究ではカメラを用いた死角に存在する観測対象物の検出と視覚支援システムを設計する. まず, カメラからみた観測対象物の相対位置姿勢について述べ, カメラの自己位置姿勢を推定するためにオブザーバを構築する. 次に, 観測用のカメラから観測対象物を抽出するため, 背景差分法による画像処理をおこなう. そして, オブザーバの検証実験と視覚支援の検証実験をおこない, カメラ3画像平面中に描く矩形図と観測対象物は一致することを確認する. このシステムにより, ドライバーが死角に存在する歩行者に対して, 衝突危険度を推測することが可能となる.
固定カメラを利用した全方位移動ロボットの製作と制御
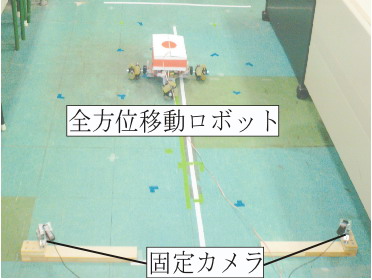
本研究では備えられたランドマークを利用せず, 外部のセンサを用いてロボットを制御するシステムの構築を目指す. その方法として, ロボット外に設置した固定カメラを利用しロボットの位置を推定するシステムを提案する. この方法の有用性を検証するために, 全方位移動ロボットを製作し, 実験を行った. 検証実験は考案した固定カメラを利用したロボットの位置推定を行い, 入力した目標位置へ移動するか確認する. 実験から目標位置を認識し移動していることから提案した手法の有効性を確認した.
ステレオ視を用いた 4 自由度マニピュレータの視覚フィードバック制御
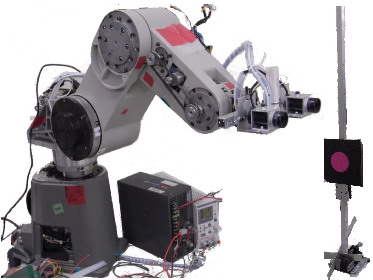
本研究では, ステレオ視を用いた4自由度マニピュレータの視覚フィードバック制御システムの実現を目的とする. 観測対象物の特徴点は1つとし, Eye-in-Hand構造の冗長性を有したマニピュレータでそれを認識, 3次元空間で相対位置と手先姿勢を考慮した追従動作を制御問題として取り扱う. 制御問題を反映したボディヤコビアンとステレオ視による画像ヤコビアンを導出し, 特徴ベース法に基づいた制御則を提案した. 実験として静止した観測対象物に対して制御則を実行し, システムを検証した. 結果より, 時間の経過とともに目標値に近づくことが確認でき有効性が示された.