・2輪型倒立振子ロボットの画像認識による姿勢制御
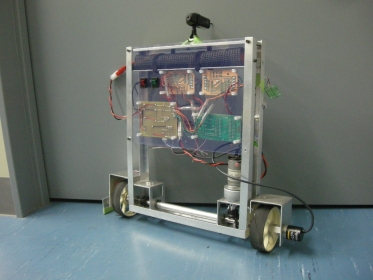
本研究では,2輪型倒立振子ロボットにカメラから得た視覚情報を利用した姿勢制御を実装することを目標とする.まず,ポテンショメータで角度を検出し,ロボットを倒立させることで姿勢制御の基盤を築く.ロボットの上部に取り付けたカメラの画像をPCで処理し, y 軸方向の重心座標 fy [pixel]を算出する.算出した値をマイコンに送りロボットの傾きθをもとめ,その値をポテンショメータの角度と置き換えて倒立が可能か検証をおこなった.
・RFIDと視覚情報を用いた荷物搬送ロボットの製作と制御

本研究では RFID と視覚情報を用いた荷物搬送ロボットの製作と制御をおこなった.ロボットは RFID タグに書き込まれた各分岐点もしくは目的地の経路情報を読み取り,設定された目的地へ向かう.さらに,設置した赤色のタグを特徴点として,取り付けたカメラで視覚フィードバックをおこない,ロボットをタグへと誘導する.実験では,RFID をもちいた経路選択アルゴリズムとカメラからの視覚情報により,ロボットを目的地まで誘導し,提案した方法の有効性を確認した.
・重複する側ヒレ推進器を搭載した水中ロボットの製作と制御
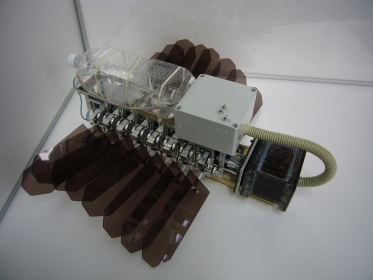
本研究では,重複する側ヒレ推進器を搭載した水中ロボットを製作し,その水中ロボットの制御をおこなった.研究の目的は,生物のメカニズムを機械的に再現し,側ヒレ推進器の性能を検証することである.水中ロボットはアノマロカリスと呼ばれる古代生物をモデルとして製作した.水中において,ヒレの揺動角度(ヒレの振れ幅)が推進力に与える影響に関してどのように作用するか実験を行い,その遊泳性能について検証をおこなった.
・リンク機構と腰軸を有する四足歩行ロボットの製作
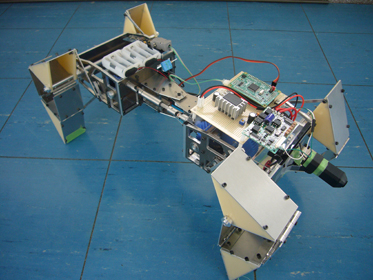
本研究では,リンク機構と腰軸を有する四足歩行ロボットを製作した.リンク機構を使用することで少ないアクチュエータで四足歩行を,ユニバーサルジョイントを使用することで腰軸を曲げることを可能にし,旋回歩行を可能にした.また,カメラを使用し,画像処理でフィードバックをかけることによって,追従歩行を可能にした.本稿では,製作したロボットの整地での目標物追従の実験をおこない,追従性能を評価した.
・視覚情報を基に落下物を受け止めるロボットの製作と制御
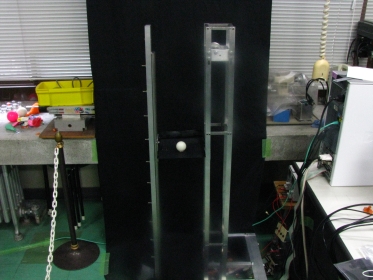
本研究は,視覚情報を用いて落下物の衝撃を吸収して受け止める動作を実現することを目的とする.この衝撃を吸収する動作を実現することによって,触覚センサを使わず物体を受け止めることが出来ると考えた.受け止める対象は自由落下する物体とし,装置は1自由度のベルトプーリ機構で行う.実現方法は対象物体の落下速度と位置情報をカメラで取得し,それを基に装置を動作させて受け止める.このとき落下物の落下速度と台の移動速度を等しくすることで,落下物と台との衝撃を吸収し受け止めることが可能となる.
・転倒時に自力復帰可能な爬虫類型4足歩行ロボットの製作
本研究では,災害時の情報収集を目的とした4足歩行ロボットを製作した.一般的に多く使用される車両型やクローラ型に対して,多脚歩行ロボットの不利点をカバーするため,研究テーマは転倒しても自力で復帰するハ虫類型の4足歩行ロボットとした.本研究では,製作したロボットの歩行に関する実験と,転倒時の復帰動作に関する実験を行った.